
Line Following Robot
Compound Gear Train and Frame CAD Design
Each part was designed by me from scratch.
Using a calculation for how much torque was needed, I was able to determine a viable gear ratio.
I decieded on a compounding gear train due to space limitations.
PID Control
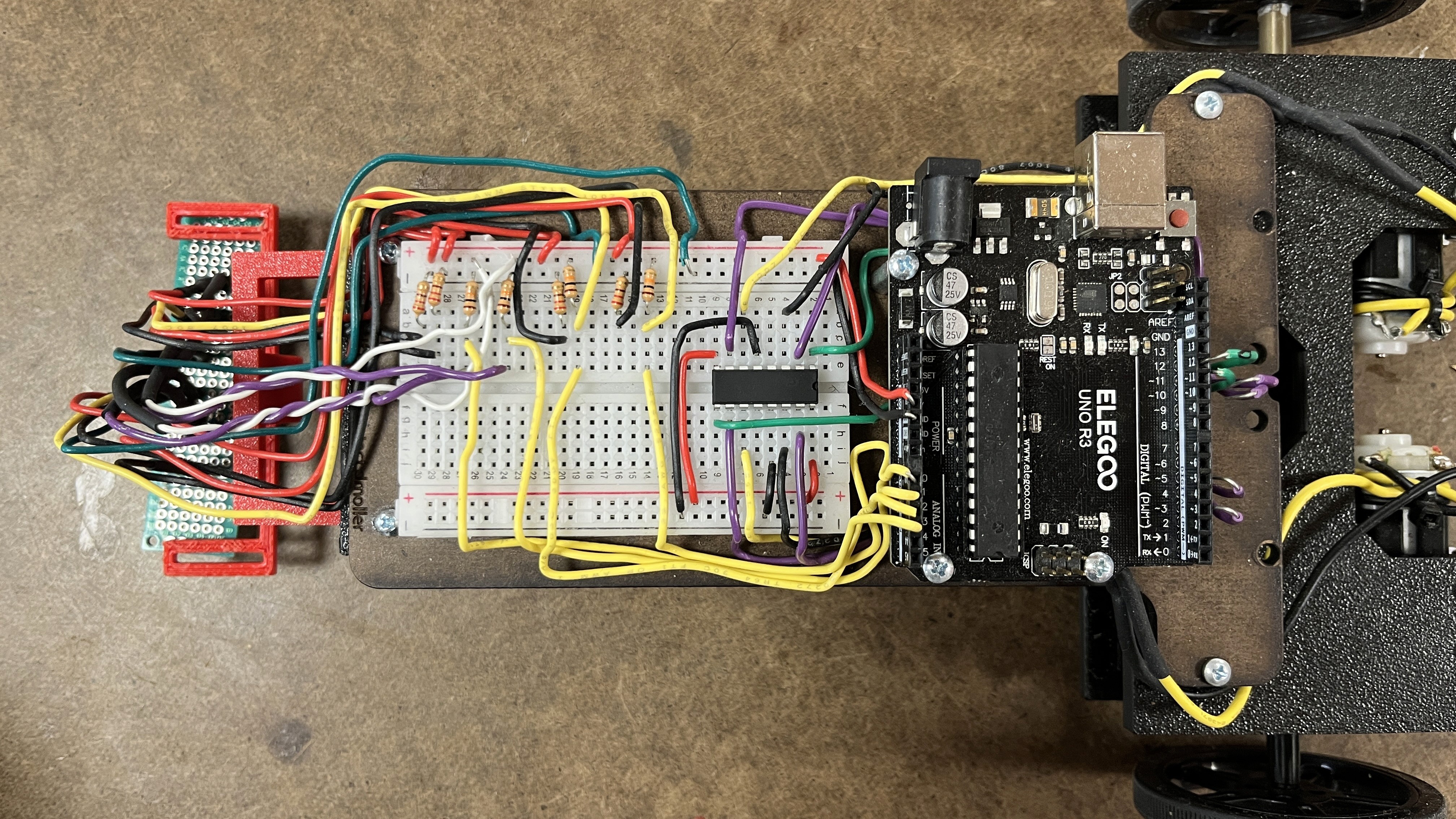
In the Arduino IDE, I implemented a PID control system based on the reading from the infared sensors.
I was peculiar about wire organizaiton and color coding.
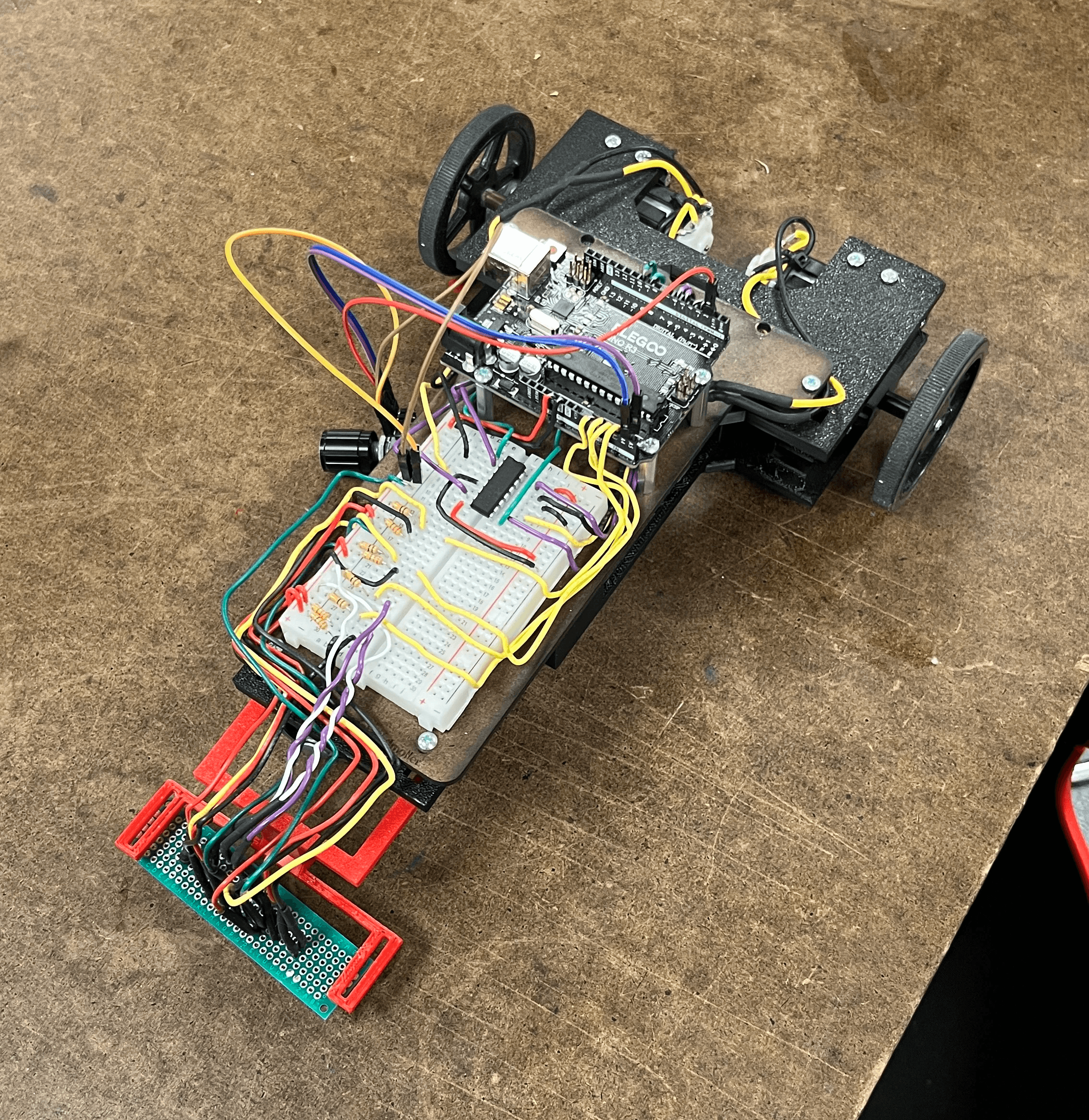
In the end, the project functioned as intended.
Afterwards an nrf24l01 was attached to make it a remote controlled robot.
Top Skills Used
Fusion 360
Hardware Prototyping
Control Systems






